

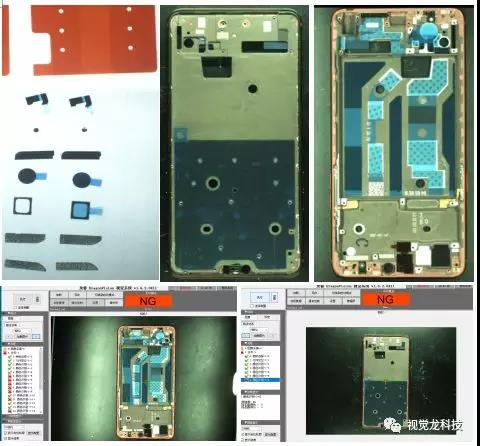
后摄像卡扣检测、前摄像导电布未贴和贴歪、扩散膜漏贴、TP-FPC卡扣漏装、螺丝漏锁和浮高、指纹卡扣的漏装、防水标漏贴、同轴线漏扣和扣歪、喇叭密封泡棉贴歪和漏贴、马达漏装、二维码芯片贴合、弹片变形和角度等。
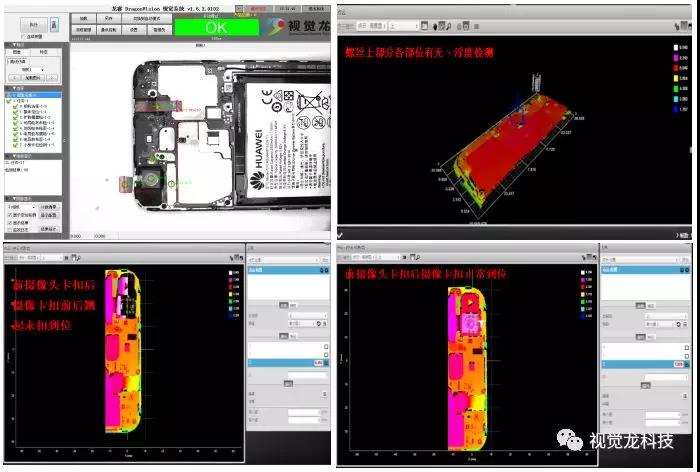
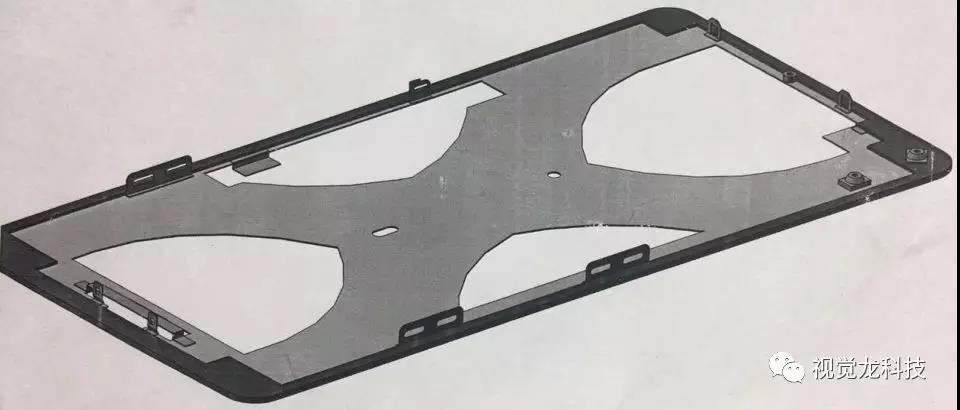
✦手机中壳2D+3D检测项目✦
检测手机中板上螺柱、凸台、弹片的尺寸、垂直度、平面度、位置度。
工位1:采用11台工业相机,收集,分析和判断产品的螺柱、凸台、弹片的尺寸、位置。
工位2:采用4个3D激光传感器立式和测式方式扫描检查产品长边的垂直度和平面度。
工位3:采用4个3D激光传感器立式和测式方式扫描检查产品短边的垂直度和平面度。
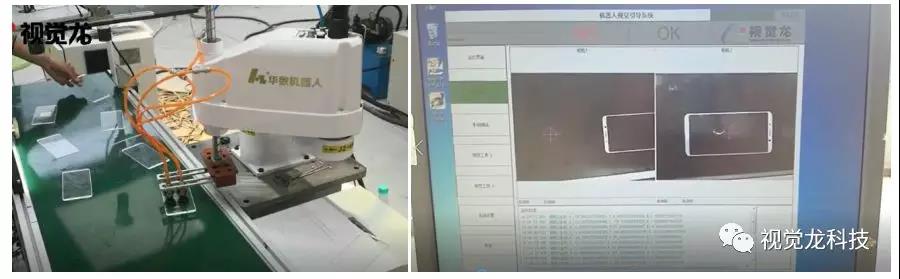
✦手机玻璃传送带跟踪项目✦
经过CNC加工后的手机玻璃,通过传送带依次流入视觉工位,CCD相机动态拍照,将定位结果依次发送给后端的机器人,当手机玻璃进去机器人抓取区域后,机器人根据视觉给出的X、Y、R和编码器的值,来动态抓取玻璃放置在下一个检测工位。
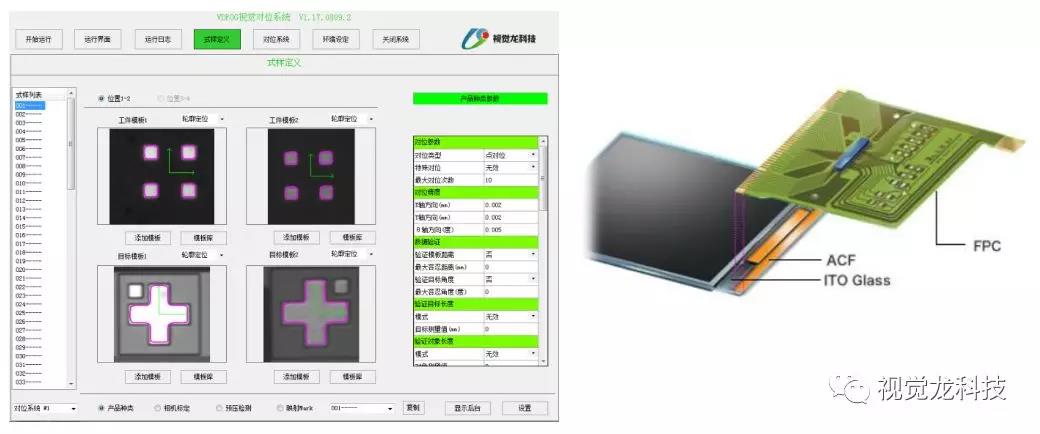
✦手机液晶屏视觉对位项目✦
ACF绑定纠偏:通过拍摄液晶玻璃的两个Mark点,计算对象靶标与模板靶标之间的相对位置。
预压绑定纠偏:分别拍摄FPC与液晶玻璃的两个Mark点,计算目标靶标与对象靶标的相对位置。
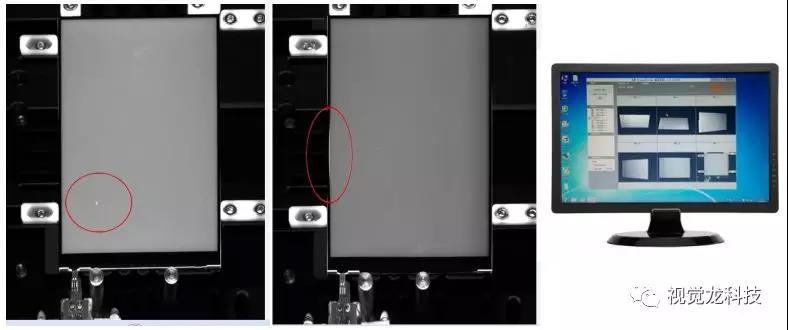
✦手机背光模组检测项目✦
在背光屏不点亮情况下,通过线扫相机检测表面的划伤、灰尘异物、污染、黑框贴合不到位等缺陷。
在背光屏点亮的情况下,通过面阵相机5个不同方向采集的图像检测背光屏发光偏暗、发光偏亮、白点及白印、内层划伤、异物、贴合异常导致的亮边等等缺陷。
✦**纠偏项目✦
机械手从翻转机构上吸取产品后,运动至视觉拍照位,相机拍照定位产品位置与角度发送给机械手,机械手纠偏后放入对应的测试治具中。定位精度≤0.1mm。

✦手机摄像头镜片定位组装项目✦
视觉部分共分7个工位完成,工位1检测镜片上料是否OK,工位2为对位贴合C-MESH,工位3为检测C-MESH的贴合状况,工位4为膜耳朵的定位,撕膜后的检测及自动贴HAF胶,工位5为检测HAF的贴合状况,工位6为检测镜片装配状况,工位7为**终的检测。
✦手机屏幕定位检测项目✦
1号相机固定安装来定位产品的孔位,2号相机可上下调整位置来保证不同弧边的拍照在同一焦距。产品放置于X/Y运动平台,运动到2号相机的各个拍照点来拍照定位。定位精度≤0.01mm。
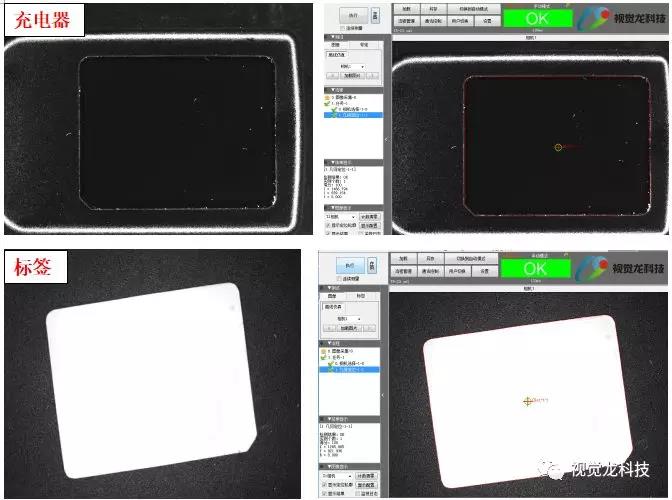
✦充电器贴标贴合项目✦
通过视觉龙产品定位充电器和标签对位贴合,精度0.1mm。
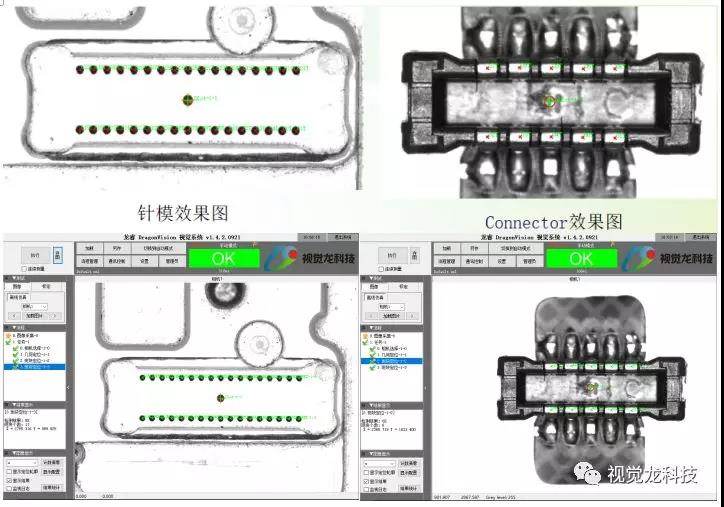
✦PCB Connector对位检测项目✦
吸盘抓取PCB Connector,相机拍照定位后放置于针模治具内,要求视觉定位精度在±0.03mm以内。
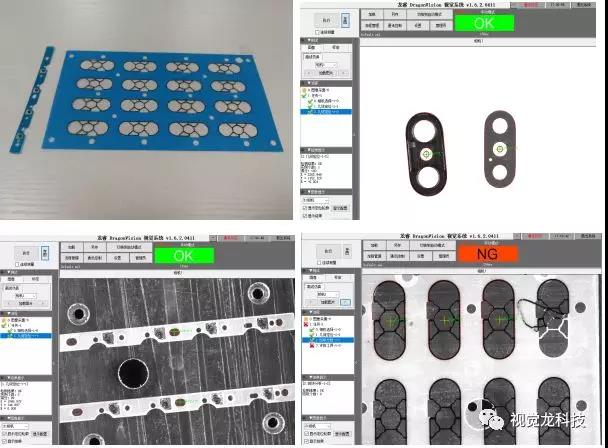
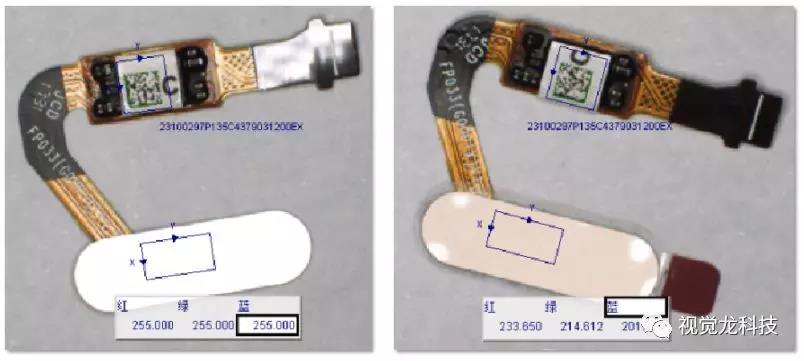
✦手机指纹识别模组读码和识别定位项目✦
本项目除了读取二维码以外,要识别7-8种颜色,其中有些颜色特别接近(如金色和香槟色),视觉系统识别后引导机械手放到不同的料盘里。
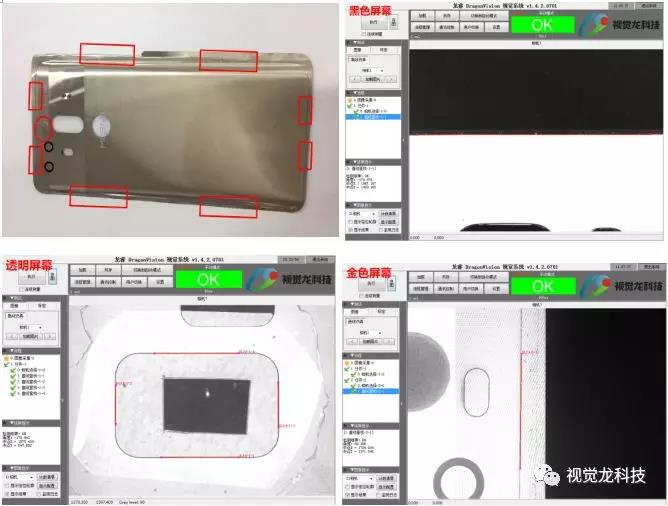
✦手机贴膜视觉检测项目✦
手机壳及膜颜色有多种,判断手机壳正反两面有无贴膜,判断手机壳上贴膜位置有效公差±0.1mm范围内。轮廓不清晰或贴膜重叠的位置先通过几何定位工具定位手机壳的位置,再通过颜色识别定位跟随检测特定位置的颜色,从而判断有无贴膜及贴膜位置是否准确。
✦SIM卡套颜色识别检测项目✦
定位视野中的SIM卡托,视觉系统识别卡托颜色(墨绿色、蓝色、 黑色、 粉色四种),通知设备分拣不同颜色的SIM卡托。

✦USB CABLE尺寸测量项目✦
检测AM端外露尺寸以及MICRO端外露尺寸,检测MICRO连接器的弹片以及PIN是否为良品。

Dragon Vision集成式智能相机是一套可配置多任务的综合视觉处理系统,架构开放、支持多任务组、协同或独立工作。支持多相机、工具自由配置、工具间结果相互引用。工具包覆盖检测、彩色识别、2D/3D测量、3D检测、对位贴合、2D/3D机器人定位、读码等。并支持字串、多结果、并行输出。